انطباق خودکار با بهروزرسانی پیوسته موقعیت برای نویگیشن جراحی بدون مارکر در جراحی ستون فقرات

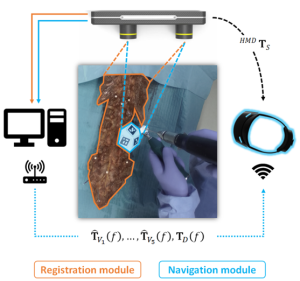
ثابت شده است که سیستمهای نویگیشن جراحی برای قرارگیری پیچگذاری پدیکل مهرههای ستون فقرات دقیق هستند، اما هنوز محدودیتهایی در انطباق یا هدایت جراحی وجود دارد. انطباق اطلاعات قبل از عمل با آناتومی حین عمل، یک کار زمانبر و نیز مستعد خطا میباشد که شامل قرارگرفتن در معرض تشعشعات مضر است. هدایت جراحی از طریق نمایشگرهای معمولی دارای مشکلات شناخته شده است؛ زیرا نمیتوان اطلاعات را در موقعیت و از دیدگاه جراح ارائه نمود. در نتیجه، روشهای انطباق بدون تشعشع و خودکارتر با بازخورد نویگیشن متعاقب جراح محور، مطلوب هستند. این مقاله، به ارائه یک روش خودکار بدون تشعشع برای جراحی فیوژن ستون فقرات کمری برای حل این مشکل پرداخته است. یک شبکه عصبی عمیق برای بخشبندی ستون فقرات کمری و پیشبینی همزمان جهت آن آموزش داده شده است که یک حالت اولیه برای مدلهای قبل از عمل ایجاد میکند که سپس برای هر مهره به صورت جداگانه و بلادرنگ در حین رسیدگی به انسداد جراح بهروزرسانی میشود. سختافزار پیشنهادی شامل یک سنسور RGB-D (برای نمایش محل جراحی از بالا)، یک ایستگاه کاری مجهز به GPU و یک نمایشگر بر روی سر[۱] با استفاده از دستگاههای ZED Mini، HP Z2 و عینک Microsoft HoloLens 2 است که میتوان در قالب دو ماژول انطباق برای بخشبندی و انطباق خودکار مهرههای کمری و نویگیشن بهمنظور ردیابی ابزار اسلیو دریل جراحی و یافتن تبدیل سهبعدی در هر فریم تقسیمبندی نمود. ماژول انطباق و بخش اول ماژول نویگیشن به عنوان یک برنامه C++ با قابلیت بلادرنگ با یک پنجرهOpenGL برای نمایش زنده و اهداف کنترل، پیادهسازی شده است. بخش دوم ماژول نویگیشن شامل هدایت واقعیت افزوده[۲] پیادهسازی شده در محیط Unity برای قرارگیری پیچگذاری پدیکل بر اساس موقعیتهای دریافتی مهره و ابزار جراحی اسلیو از تشخیص استاندارد صفحه شطرنج است. هدف هدایت AR برای قرار دادن پیچ پدیکل، نویگیشن دقیق و سریع نقطه ورودی و مسیر پیچ است که پس از راهاندازی برنامه، بهطور مداوم موقعیتهای مدلهای قبل از عمل L1–L5 و همچنین موقعیت ابزار .جراحی اسلیو دریل را دریافت میکند.
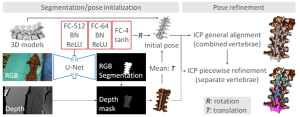
روش انطباق به دو قسمت بخشبندی/مقداردهی اولیه و اصلاح موقعیت تقسیم میشود. مرحله اول این روش، متکی به شبکه عصبی عمیق U-Net و پیشبینی جهت مبتنی بر رگرسیون میباشد. برای یک فریم اولیه مشخص و در طول زمان استنتاج، شبکه یک ماسک بخشبندی باینری دوبعدی را به عنوان خروجی برای ستون فقرات کمری و یک تخمین از چرخش ستون فقرات در سیستم میدهد. خروجی بخشبندیشده برای تصویر عمق مربوطه استفاده میشود که منجر به ابر نقاط بخشبندی شده از ستون فقرات کمری میشود. مدلهای سهبعدی قبل از عمل با جهت پیشبینی شده به عنوان چرخش و مرکز جرم ابر نقطه بخشبندی شده به عنوان انتقال تبدیل میشوند. در مرحله دوم، انطباق مدلهای سهبعدی ترکیبی قبل از عمل با استفاده از الگوریتم انطباق نزدیکترین نقطه تکراری تکرار[۱] انجام میشود و به دنبال آن یک انطباق ICP تکهای برای هر مهره (اصلاح تکهای) انجام میشود. با استفاده از موقعیت دقیق تعیین شده از یک فریم اولیه، جبران حرکت کارآمد در فریمهای تعامل بعدی با اعمال تکراری بخشبندی و مراحل اصلاحات تکهای به دست میآید. در این کار، از مجموعهداده SpineDepth شامل ضبطهای RGB-D با حاشیهنویسی موقعیت مربوط به جراحیهای ماکت ستون فقرات انجام شده بر روی ۸ نمونه جسد استفاده شده است. در هر جراحی، ده پیچ پدیکل به صورت دو طرفه در مهره های L1-L5 قرار داده شد. قرارگیری هر پیچ به چهار مرحله جراحی تقسیم شد که هر کدام در یک ضبط جداگانه توسط دو سنسور RGB-D رو به پایین به طور همزمان ضبط شد. پس از هر قرارگیری پیچ، سنسورها برای گرفتن محل جراحی از یک موقعیت جدید، تغییر مکان دادند. همچنین در مجموعه داده و برای هر نمونه، مدلهای سهبعدی قبل از عمل از مهرههای L1-L5، در دسترس هستند که از نظر مکانی با موقعیت واقعی آناتومی همتراز هستند. در نهایت پس از انجام انطباق بر اساس فریم اولیه، موقعیتهای مدل های قبل از عمل L1–L5 به صورت جداگانه به محض در دسترس بودن یک فریم جدید به روزرسانی می شوند. با ادغام در یک سیستم نویگیشن مبتنی بر واقعیت افزوده، یک هدایت جراحی بصری ارائه شده است. روش انطباق بر روی یک مجموعه داده عمومی با میانگین ۹۶٪ انطباق موفقیت آمیز، خطای انطباق هدف[۱] ۲٫۷۳ میلی متر، خطای مسیر پیچ ۱٫۷۹ درجه و خطای نقطه ورود پیچ ۲٫۴۳ میلی متر تأیید شد. علاوه بر این، کل مراحل در یک جراحی ex-vivo تأیید شد، که دقت پیچ ۱۰۰٪ و دقت انطباق ۱٫۲۰ میلی متر را به دست آمد. این نتایج، خواستههای بالینی را برآورده میکند و بر پتانسیل دادههای RGB-D برای رویکردهای انطباق کاملاً خودکار در ترکیب با هدایت واقعیت افزوده تأکید میکند.
[۱] Head-mounted display
[۲] Augmented Reality (AR)
[۳] Iterative closest point (ICP)
[۴] Target Registration Error (TRE)
منبع: Liebmann, Florentin, et al. “Automatic registration with continuous pose updates for marker-less surgical navigation in spine surgery.” arXiv preprint arXiv:2308.02917 (2023).


